| 当前位置:首页 > 机器人底盘设计 |
松灵全向型机器人底盘Ranger Mini-结构原理与参数 |
| 来源:松灵 时间:2022/5/6 |
| Ranger Mini延续松灵机器人全向型UGV技术底蕴,小巧机身,零转弯半径,可实现原地360°转向.机身采用4组8个轮毂电机控制体系,简化机械结构的同时将多种运动模式容纳于一身,进一步解放机器人平台运动能力。 全金属机身,硬朗工业设计 4*120W转向电机组+4*250W驱动电机组 支持自旋、横移、斜移、阿克曼模式
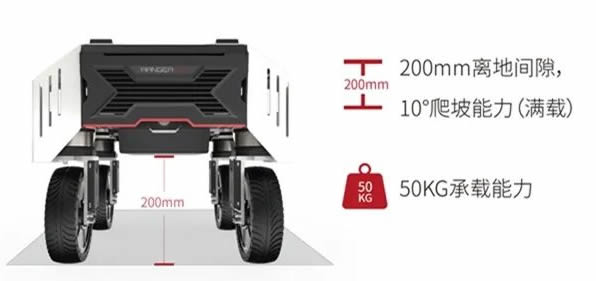
Ranger Mini作为一款超强灵活性与性能并存的UGV,容纳SCOUT 系列越障攀爬与HUNTER系列高承载长续航优点于一身.得益于AGILEX运动控制技术底蕴,室内户外运行得心应手.摇摆臂悬挂,更高的离地间隙,为室内外作业带来全新的移动体验.
|
| 信息推荐 |
| 机器人底盘 |
| 水滴2系列机器人底盘 |
| 方舟系列机器人底盘 |
| 云海系列机器人底盘 |
| 近期动态 |